Share post:



Border surveillance has started to play a major role in domestic and foreign policy issues with the increasing number of terrorist attacks and the increasing mass illegal migration. Therefore, enhanced border-surveillance schemes have become increasingly important to respond effectively to these problems. Current border surveillance procedures are mainly based on agents patrolling the borders (at sea, on land, or aerial patrols). The current technologies employ different types of sensors (seismic sensors, thermal sensors and noise sensors), light towers, night vision cameras, video surveillance systems and unmanned aerial vehicles (UAVs).
A sensor network may contain a huge number of simple sensors that are densely deployed at some inspected site. In large areas, the sensor network is likely to have a mesh structure. In this case, the sensors also act as routers, forwarding packets from one of their neighbours to another. Currently, the information gathered by sensors can be delivered to a centralised node, usually referred to as a gateway. The gateway is assumed to have a much higher processing capability than the sensors and, in some cases, it has connectivity to a remote network as well.
Fleets of UAVs can allow border security agencies to deploy fewer agents while keeping the capability to detect intruders, using the freed agents to respond effectively to newly-detected threats. However, current UAVs, cameras and sensors for surveillance purpose cannot take advantage of last solutions to improve data collection, analysis and transmission to avoid limits due to unwanted environmental events, attacks, network failures thus the overall performance greatly depends on staff availability and coordination, and the systems are prone to vandalism, interference, tampering, and sabotage. In addition, they are not cost-effective, and cannot be deployed at some border areas.
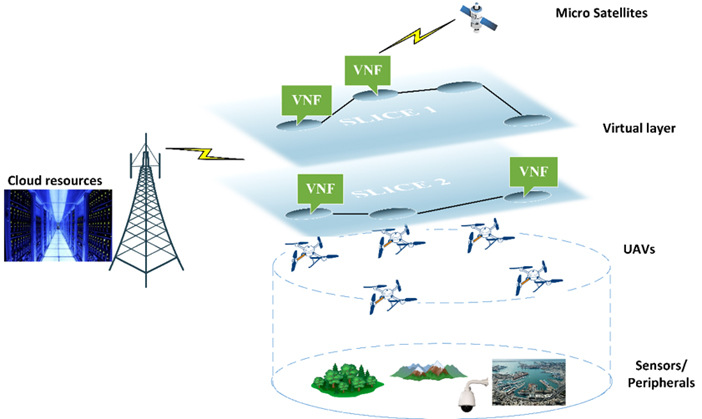
The project DAVOSS aims to develop a multi-layer virtualised system in which all the technologies mentioned above can operate together to guarantee efficient and effective borders and ports surveillance, or environmental security. The figure below depicts the proposed network and architecture.
The proposal specifies four main system layers of interest, such as the one constituted by sensors (Layer 1), the one composed by UAVs (Layer 2), the one deploying virtualisation (Layer 3) and the one providing Wide Area Connectivity through 4G-5G, blimps or cubesats (Layer 4).
Examples of some DAVOSS applications:
The project is funded by NATO Science for Peace and Security Programme.
A Survey on Technologies, Standards and Open Challenges in Satellite IoT
M. Centenaro, C. E. Costa, F. Granelli, C. Sacchi, L. Vangelista
in: IEEE Communications Surveys and Tutorials, , 2021
[doi]
The effort of telecommunications operators in 5G design and implementation is oriented to effective and efficient verticals support. Full network softwarization will deploy tools such as software-defined ... Read More
The paper "A Virtualized Border Control System based on UAVs: Design and Energy Efficiency Considerations", by R. Bassoli, C. Sacchi, F. Granelli and I. Ashkenazi was accepted for presentation ... Read More
The paper 'An Algebraic Approach to Network Slicing' has been accepted for oral presentation at the European Wireless 2019 conference. The article proposes a novel and unique general model ... Read More
Prof. F. Granelli and Prof. F. Fitzek will jointly present the tutorial "Softwarization Concepts and Practice in 5G Communication Systems: SDN, NFV, ICN" at upcoming IEEE WCNC 2019. If you are interested, ... Read More
Prof. F. Granelli and Prof. F. Fitzek (TU Dresden) will teach everything you need to know on SDN/NFV at IEEE Globecom 2019. If you are attending Globecom in Hawaii, check out our tutorial and industry ... Read More
Prof. F. Granelli and his team will be present at IEEE 5G World Forum in Dresden.Tomorrow, Prof. F. Granelli will provide a presentation about "NFV across terrestrial, aerial and satellite networks" ... Read More
The following article is now available in early access:"CubeSat-Based 5G Cloud Radio Access Network: A novel paradigm for on-demand anytime-anywhere connectivity"by R. Bassoli, F. Granelli, C. Sacchi, ... Read More
The book “Advanced Technologies for Security Applications - Proceedings of the NATO Science for Peace and Security 'Cluster Workshop on Advanced Technologies', 17-18 September 2019, Leuven, Belgium” ... Read More
The recently-completed DAVOSS project was featured in a press release by NATO:From robots to disaster management – how autonomous systems help NATO stay connectedThe SPS Programme supports projects ... Read More
We made the news! An article dedicated to DAVOSS appeared on "Il Sole 24 Ore" in a section dedicated to the last development in Aerospace technology.Congratulations to the team!Here is the link to ... Read More
The final version of our article End-to-End Performance Assessment of a 3D Network for 6G Connectivity on Mars Surface is now available online at this link.Enjoy our discussion about how to split ... Read More
This WP allows technical and management coordination in order to achieve the goals of the DAVOSS project. Given the reduced number of partners, each partner (excluding end-users) will nominate one person for management issues and one person for technical issues. Those will constitute the project Steering Board. The Steering Board will periodically interact with the Advisory Board (at least twice per year), which will be coordinated by a person nominated by the end-user and will group potential stakeholders of the project (for example, the local government, companies, etc.).
This WP will have the task to define the technical specifications of the different components of the DAVOSS project, based on the reference architecture defined in Figure 2 of the proposal. Technical specifications will represent the input of the activities to develop in WPs 3, 4, 5.
The project DAVOSS aims to develop a multi-layer virtualised system in which all the technologies listed above work together to guarantee efficient and effective borders and ports surveillance. Especially, the proposal identifies four main system layers such as the one constituted by sensors (Layer 1), the one composed by UAVs (Layer 2), the one that deploys virtualisation (Layer 3) and the one with micro satellites (Layer 4).
This WP is mostly focused on Layer 1, where a new model of sensor networks, which better fits the need to protect very long borders, will be developed. The idea is to deploy many (thousands) of small clusters, each contains a few tens of sensors. Each cluster forms a mesh, and routing on the mesh is conducted in the traditional approach described above. However, instead of deploying thousands of gateways (one per each cluster) and connecting each gateway to the command center using very expensive technologies, the idea is to use one or more "mobile gateways", which will travel between the various clusters and collect up-to-date information from each cluster. A mobile gateway, built on an autonomous vehicle, is connected to the command center by means of a satellite link, and it can immediately forward every piece of important information it receives from each cluster.
This WP focuses on Layers 2-4 of the reference architecture. Layer 2 includes the fleet of UAVs. The transmission of high-quality/high-quantity of data obtained by Layer 1, is guaranteed by the use of virtualisation and software-defined networking (SDN) provided by Layer 3. These technologies provide a real-time adaptation of the infrastructure/network and accurate routing/processing/storage of information. Then, contextualised data analysis is used to prevent security threats and unwanted network conditions, and it will offer robustness in terms of security and self-healing. Furthermore, Layer 2 will maximise system automation and autonomy, centralised configuration, quick and secure access to information, and encapsulating information at different user's levels thanks to slicing procedures.
Layer 4 will guarantee additional coverage to UAVs via micro satellites support. In particular, the focus on the activity will be on the support of cubesat satellites. In the DAVOSS project, we aim at demonstrating that cubesats can efficiently support the Layer 4 functionalities with a high degree of flexibility, re-configurability, cost and energy efficiency. However, since cubesats represent a technology not yet completely mature and widely available, the project will also study a viable alternative to provide similar service by using an Ultra Light Vehicle (a light airplane with pilot), a solution that was tested by the research group and is already available in the airport of Trento.
This WP will define DAVOSS services. Two are the main scenarios of the DAVOSS project: (i) advanced technologies for border and citizen security; (ii) services for disaster prevention and terrorist threats. In general, the usage of multimedia sensors and agile transfer to information towards a control center will be the key and central point of the proposed scenarios, where the technologies developed in DAVOSS will provide a clear added value and step forward with respect to other existing solutions. Involvement of the end-users and the project Advisory Board will be necessary for enabling the WP5 to fully achieve its goals.
This WP is concerned with the integration of the results developed within WP3, WP4 and WP5 in order to define the final DAVOSS architecture in terms of protocols, devices and functionalities, as well as the deployment of a selected set of functionalities in the form of an integrated proof-of-concept in the area of Trento.
This WP is focused on dissemination of the projects activities and results. This means the activity will be focused on two major targets: (i) the scientific community, through the submission of papers to top level conferences and journals. Priority will be given to open access publications, if possible. All works partially funded by the project will include an explicit reference to NATO funding; (ii) public bodies and potential stakeholders. At least two public events will be organized by the participants to advertise the project to the community: one during the first year of the project to promote awareness about the project and its objectives, and one during the last year to present results to potential stakeholders. In this last event, a demo of the proof-of-concept will be presented and video recorded, in order to submit the demo as well as a selected number of speeches to the SPS Office.
DAVOSS team proposes a novel paradigm to exploit CubeSats to provide on-demand 5G connectivity Read More
It will represent the logical central node of the DAVOSS drone architecture Read More